



Flight Control Characteristics:
missiles.
takeoff, parachute descent, and other take-off and landing modes, can be
connected to remote control receiver.
barometric altimeter, and airspeed meter, capable of measuring the
position, speed, airspeed, barometric height, altitude, attitude, heading,
angular velocity, acceleration, voltage, number of positioning stars, flight
time, journey, distance from home, and other information about the
aircraft.
fixed-point hover, one-key fly to target point, semi-increased stability
flight (using the joystick to control roll), homing, loss of star protection,
chain disconnection protection, low voltage protection, etc.
company's pod, it can follow the flight, target point guidance, target
position estimation, lock and attack target; in training mode, it can exit
the attack mode and pull up to hover before hitting.
positioning
Angular velocity range: -200°/s to +200°/s
Low zero-point deviation, high stability
Low proportional factor nonlinearity, low crosstalk
Measurement Range: -10g to +10g (maximum ±15g axial)
Low zero-point deviation, high stability
High bandwidth response in dynamic environments
Initial alignment attitude error ≤1.0°
Position accuracy within 120 meters (short-term solution)
Attitude accuracy within 1.6°
| Product Name | Integrated flight controller |
|---|---|
|
Accelerometer measurement range |
-10g~10g, (axial -15g~15g). |
|
Accelerometer zero bias |
≤ 15mg (3σ) |
|
Accelerometer zero bias stability |
≤ 15mg (3σ) |
|
Accelerometer scale factor non-linearity |
≤ 500ppm |
|
Accelerometer cross-coupling coefficient |
≤ 500ppm |
|
Accelerometer bandwidth: |
≥ 70Hz (phase lag 90° |
|
Navigation initial alignment attitude error |
≤1.0° (3σ) |
|
Initial alignment time |
≤ 40s |
|
Navigation solution position error within 18s |
≤120m (3σ) |
|
Navigation solution attitude error (including initial alignment error) within 18s |
≤ 1.6° (3σ) |
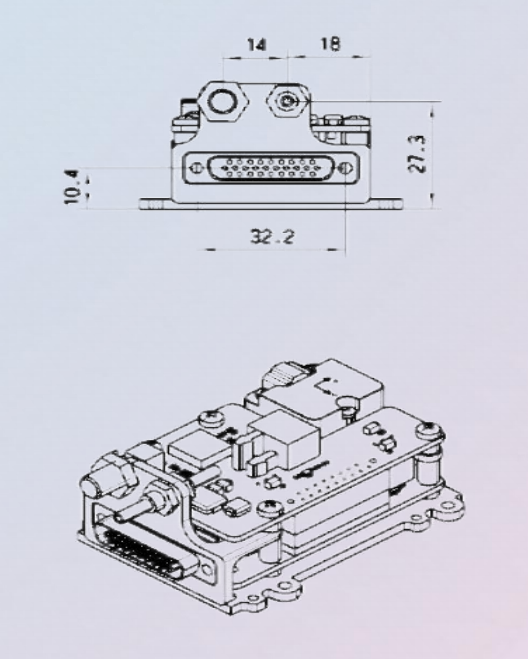
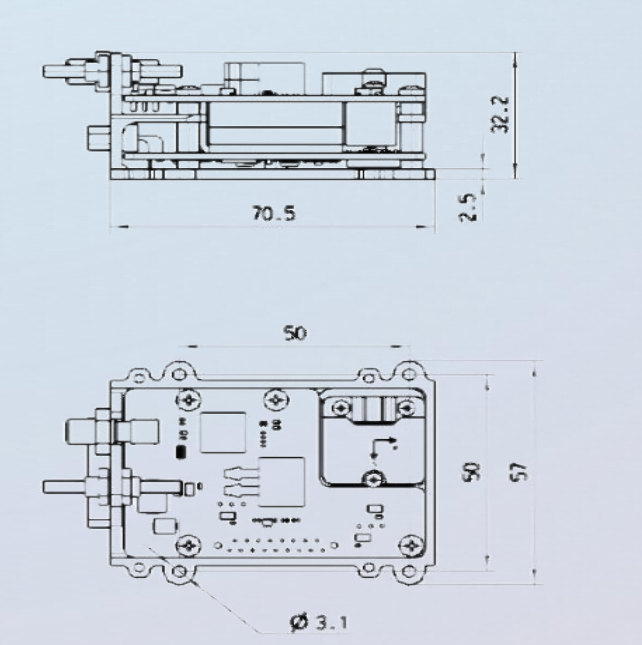
The integrated flight controller is suitable for systems requiring precise navigation and stable control performance
It provides real-time navigation, motion sensing, and flight control in a single integrated unit.
The initial alignment time is ≤40 seconds.
Yes, with high bandwidth sensors and stable performance, it is designed for dynamic conditions.


